

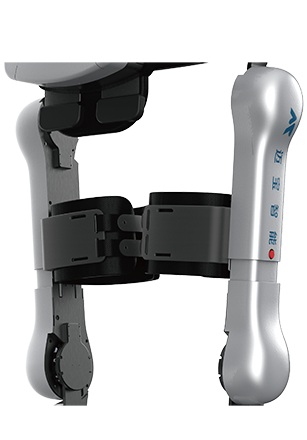
YETI intelligent wearable exoskeleton robot is a powerful platform that can be re-developed and has amazing expressive power. The platform has control interfaces such as EMG, EEG, and voice, and integrates various detection sensors, which can be used for research on cutting-edge topics such as physical tight coupling, gait analysis and learning, and intention control. At present, the products have been used in many well-known domestic colleges and laboratories.






Multiple development platforms
Support win, linux, ROS and other systems
Multiple development languages
Support c, c++, python and other development languages
Multiple hardware interfaces
UART, CAN, SPI, I2C, Bluetooth···
Full open source SDK
Provide multiple Demo programs
.png)
Four major applied disciplines

Robot control
Human Factors Engineering
Biomechanics
Rehabilitation Medicine
Four major applied disciplines
Robot control
Human Factors Engineering
Biomechanics
Rehabilitation Medicine
Physical human-computer interaction
Robot motion control
Gait analysis
Artificial Intelligence
Intention judgment

As one of the core products for the education ecology, users can set the driving parameters of each active joint under the guidance of its friendly human-computer interaction interface, explore more application scenarios, and realize more creativity.